 |
ModelSpace
|

#include <Measurements.hpp>
Public Member Functions | |
| virtual int | calculateMeasurements (T time, const std::array< T, N > &tar_state, const std::array< T, O > &obs_state, std::array< T, M > &out_measurements) |
| Function to calculate range and range rate from current state of system. | |
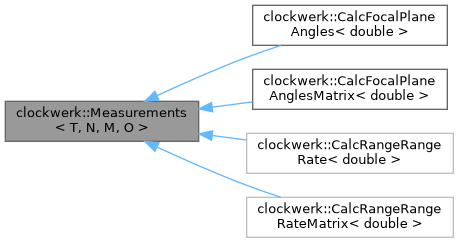
The measurements class defines a generic, templated base class which may be used generically as a measurement update in the EKF measurement update class. The values N, M, and O should be assigned and are defined as follows: N - The number of states in the target state vector. i.e. 3 for [x, y, z] M - The number of measurements produced by the function. i.e. 2 for [range, rangerate] O - The number of observer states. May be unused but could be i.e. another [x, y, z] for range
This class should be inherited from and applied via implementation of the calcMeasurements function.
|
inlinevirtual |
Function to calculate range and range rate from current state of system.
| time | The reference time |
| tar_state | The target reference state |
| obs_state | The observer reference state |
| out_measurements | Implicit return of measurements based on time, state |
